Design Case study
Constroll
Concept Vehicle for Difficult Terrain
by
Introduction
Most of the earthA¢AAs land surface is inaccessible to regular vehicles so thereA¢AAs a need of the same that can handle difficult terrain. TodayA¢AAs vehicles are mostly designed tor travelling over relatively smooth, level or inclined, surfuces. This thought lead to the project. The vehicles would have applications in forestry, agriculture, (planetary) exploration, adventure sports, utilitarian, fire fighting, disaster or hazardous areas and construction sites. Main objective was to identifY a new niche for which a vehicle could be made. Only vehicles that use ground contact for propulsion would be considered which means that vehicles travelling through air or water are not included.
The term difficult is not a very clear description of the terrain and there is no clear distinction between easy and difficult terrain. The degree of difficulty is also dependent on the properties of the vehicle itself, such as its size and locomotion system. Hence understanding and defining difficult terra in was the first step taken. The properties that define difficulty of a terrain and a huge pool of difficult terrains were studied. A trip to Matheran was made and an interview with Wolf Dietrich, LEDEG, helped gain valuable insights regarding the same.
The purpose oflocomotion was to be understood as it would decide the extent of performance of the concept. Types oflocomotion, their advantages and disadvantages, existing solutions and the technology in use for the vehicles tackling similar terrain were studied.
Having done the research, a niche for which the vehicle was to be made was decided by creation of a questionnaire. Experts from four, ofthe many, applications ofinterest were telephone interviewed and responses noted down. The insights gained through the questionnaire lead to working towards a difficult terrain vehicle for engineers working at construction or mining sites, a niche which was found untouched when it comes to personal mobilty.
Concept electric vehicle for on-site use by engineers was the decided brief that demanded a single seated vehicle. The minimum dimensions for the cab space was set by considering ergonomic and anthropometric data. The technological package was set for the vehicle based on ratings done for the three concepts generated.
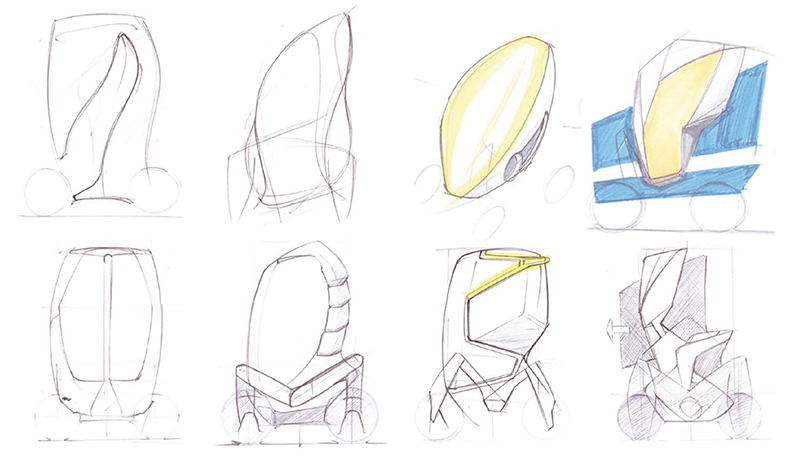
Since the dimensions were to be kept minimum, the idea of big wheels was no more valid. Smaller, articulated, wheels have been used instead to tackle the undulations and obstacles in terrain. In very difficult situations the wheels can lock, and act merely as feet, as the arms articulate and hence the vehicle crawls its way out. Form exploration was done taking inspiration from pangolin and armadillo lizard as they are nature' s examples combining rolling and legged locomotion.
The project concluded with the creation of a 1:5 scale model of the concept that was awarded the Special Jury Award at the Automotive Design Challenge (ADC) 2012, organized by SIAM.
Case Study Downloads:
• Constroll - Concept Vehicle for Difficult Terrain - Pdf